Precision colony picking
Why Reliability Beats Speed
Is your colony picker reliable?
Problems with accuracy and precision can limit the reliability of lab automation solutions, with serious implications for data integrity, resource use and confidence in associated findings. Understanding the benefits and limitations of automating various life sciences processes is therefore paramount before choosing a solution (Holland et al., 2020).
The reliability of colony picking systems is particularly dependent on picking the correct colony, and only the correct colony, every time. In this article we consider the careful balance between reliability and speed when automating colony picking.
The consequences of unreliable colony picking
Automated colony pickers aim to speed up experiments, opening up new avenues of research that simply wouldn’t be possible using time-consuming manual protocols.
But to truly save time it is imperative that robots can produce consistently accurate results without damaging agar, missing targets, or splashing neighbouring colonies.
Accidentally missing a colony during picking results in no material transfer, leading to empty wells in PCR/MWP plates, missing data points and false negatives.
Missed picks are often undetectable at the time, requiring workers to factor in extra picks to avoid a reduced sample size. In some workflows, this can be a frustrating inefficiency, but in other workflows, it may lead to the loss of samples with valuable genotypes.
Arguably, it can be even more damaging if the wrong colony is picked. Contamination can lead to false results and lack of traceability. This can result in incorrect conclusions, potentially invalidating the entire experiment and misleading subsequent research or clinical decisions.
Accuracy vs Precision
Just as manual colony picking requires careful consideration of colony size, proximity, and picking surface, automated colony picking faces similar challenges to reliability. Instead of things like shaky hands that can limit the reliability to manual colony picking, factors like positional accuracy and precision, sterility, and picking speed come into play.
- Positional accuracy: This refers to how close picks cluster relative to the target location, while positional precision is how close picks are relative to one another. Both inaccuracy and imprecision in the X and Y axes (the length and width of a plate) can lead to missed picks and cross-contamination (Figure 1).
- Surface detection: This is also the case with inaccuracy and imprecision in the depth of the plate (Z axis). If the pinning tool fails to get close enough to the colony, insufficient colony material will be transferred. If it extends too far or too fast, the tool will damage the agar surface.
- Cell splashing: Picking biological material too quickly, meanwhile, can cause ‘cell splashing’ where the material is ejected from the colony contaminating other areas of the plate.
Together these are the top three reasons why it is often more important to prioritise precision and accuracy over speed when automating colony picking.
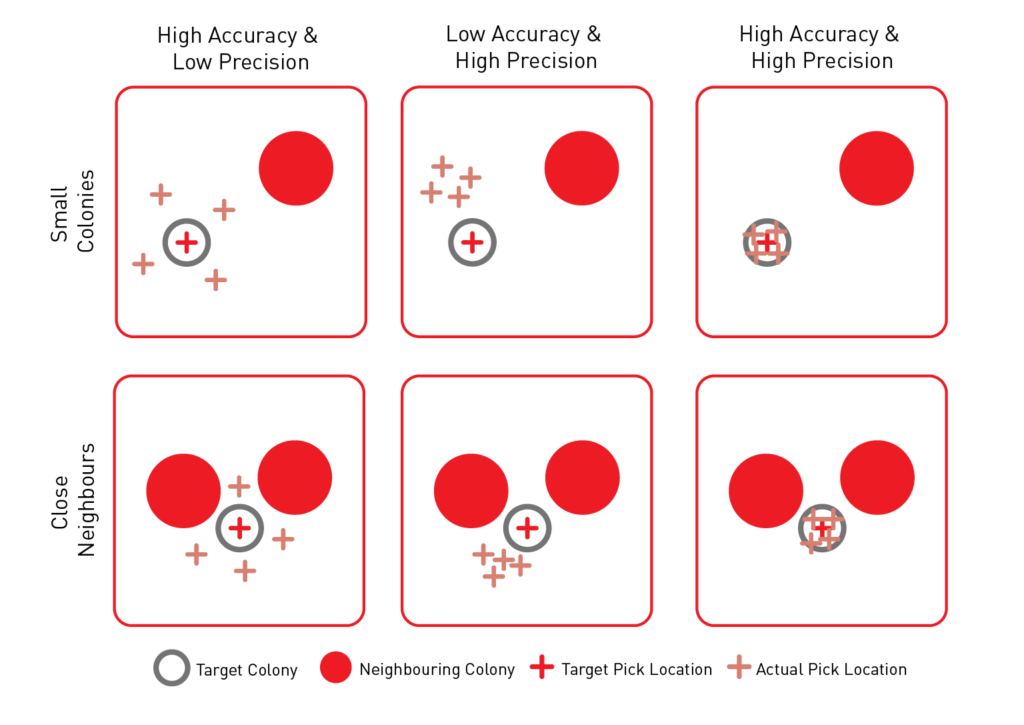
Figure 1: Precision and accuracy in the X and Y axis are essential for successful colony picking.
The importance of a well-documented API
A consistently accurate system with a well-documented API can have throughput advantages over a semi-automated colony picker that purely prioritises speed alone. Integrating with a robot arm enables workflows to run unattended overnight, eliminating the need for an operator to be present. If precision and accuracy in colony picking are crucial while processing thousands of colonies daily, integration could be the solution.
PIXL: A robot colony picker built for reliability
PIXL is an automated colony picking system that has been engineered in collaboration with synthetic biologists for accuracy and precision.
All models of the PIXL series are capable of reliably handling colonies down to 0.25 mm in diameter. The software includes user-defined proximity and circularity filters. This virtually eliminates the risk of cross-contamination by preventing the picking of colonies that are too close together or overlapping.
PinPoint picking technology enables accurate agar height detection on every pick to prevent agar surface damage and eliminate cell splashing. This reliably achieves a transfer efficiency of <99% across a range of microorganisms.
PIXL’s PickupLine filament picking system, which is cleaved after each pick, avoids the downtime and potential contamination issues associated with wash cycles to help ensure a sterile picking environment.
With these advanced features, PIXL offers a robust and reliable option for enhancing accuracy and efficiency in your lab’s colony picking processes.
Don’t let imprecision compromise your research outcomes
See for yourself how a PIXL colony picker can reduce errors, minimise contamination, and save time in your lab.

By Dr Phil Kirk | Senior Scientist
Phil heads up our Research team, combining his biological knowledge, programming experience and engineering skills to push our robots to their limits and leading experimental work to back up their use in a variety of applications and settings.
He has a background in plant science and biotechnology, and close to a decade of laboratory experience. Hence, he’s as happy wielding a micropipette as a screwdriver, loves cracking complex scientific problems, and is an absolute whizz at designing an R-script!
By ensuring our innovations do what they are designed to do, Phil’s work contributes to more reliable robots, meaning more time our customers can spend performing the work that can’t be automated: creating, interpreting, and enjoying science!